
- 熱點文章
-
- 09-14關于高等職業院校弱電專業教改的探索
- 11-28東芝將在2009年CES帶來新水平的前沿技術
- 11-28互聯網:世界的鏡子
- 11-28中美文化論壇研討數字技術保護文化
- 11-28淺析“三鹿集團奶粉事件”危機根源
- 11-28新媒體的發展及其教育創新應用研究
- 11-28樓宇信息系統的現狀與應用以及發展趨勢
- 11-28中國2009世界郵展60城市巡郵漯河站啟動
- 11-28打造煥發生命活力的教育時空
- 11-28觀察中國管理教育30年
- 11-28駕馭論:科學發展的新智囊
- 11-28軟著陸將解讀中國管理國際化新走勢
- 11-28創建中國水電國際化強勢品牌
- 11-28管理科學進入新觀察時代
- 11-28全球化傳播語境下的家國建構
- 11-28網絡民主對公民社會建設的影響研究
- 11-28奧運后中國酒店業的發展分析
- 11-28國家創新系統下的大學科研管理研究
- 11-28高校數字圖書館建設及服務模式探討
- 11-28非均衡理論及我國房地產市場供求
- 11-28綠色、安全和通訊是汽車電子的未來
- 11-28敦煌莫高窟將為游客建"數字洞窟"
- 11-28思科新軟件平臺幫媒體公司建社交網絡
- 11-28蘋果喬布斯:用13年給IT業洗一次腦
- 11-28海外傳真:2008年數字印刷市場回顧
- 11-28東芝將在2009年CES帶來新水平的前沿技術
- 11-28互聯網:世界的鏡子
- 11-28中美文化論壇研討數字技術保護文化
- 11-28故宮國圖面臨“數字化”難題 缺乏專門人才
基于DoDAF的無人直升機輔助反潛作戰系統建模分析研究
2023-12-22 13:09:00 來源:優秀文章
摘要:在深入研究DoDAF體系結構建模思想及理論的基礎上,提出一種基于DoDAF的無人直升機輔助反潛作戰系統模型。通過分析該作戰系統結構產品的含義及相互關系,給出具體的系統建模步驟,完成建模,并進行動態仿真來驗證模型,結果表明該方法合理可行。該方法為推動無人直升機輔助反潛作戰方式的流程設計和風險規避提供技術支撐,為無人直升機反潛技術的發展提供一定的參考。
關鍵詞:DoDAF;無人直升機;輔助反潛
中圖分類號:TP311.13 文獻標識碼:B 文章編號:1671-2064(2023)14-0048-04
0 引言
近年來,隨著戰爭向信息化、無人化方向發展,無人直升機的軍事應用價值得到高度重視,進入加速發展的時期,其中以“火力偵查兵”最為典型。無人直升機具有使用風險小、成本低、任務能力強的優點,最重要的是它可代替有人機來執行特殊作戰任務,大大提高了任務安全性[1]。在現代海戰中,阻止敵方力量使用魚雷等武器發射有利地形是水面艦艇編隊近程防御的重要目標。考慮到目前我國潛在對手潛艇裝備的反艦魚雷有效攻擊距離,編隊近程防御反潛作戰半徑應不小于50km。由于“安靜型”潛艇輻射噪聲明顯降低,導致了聲納探潛手段效能的大幅度下降,而當派遣反潛直升機近距離精準探測時,危險性提高。這時,無人直升機的優點彰顯無遺。無人直升機攜帶磁探儀或其他精準探測設備近距離輔助探潛,發現目標,再派上反潛直升機進行打擊,有力地發揮有人反潛直升機作戰平臺的協同作戰優勢。很大程度上增強了海上編隊的體系作戰能力[2]。
DoDAF本質上是屬于開發體系結構的基本框架之一,該方法具有實用性強的特點。當前,美軍集成與開發系統的主要標準便是基于該體系架構,國內一些單位也運用DoDAF理論指導產品設計和模型構建,進行了一些卓有成效的工作。在研究DoDAF體系結構開發理論基礎上,本文提出了一種無人直升機輔助有人直升機探潛系統模型構建方法,從根本上闡明了無人直升機輔助有人直升機反潛作戰的活動過程,可對無人直升機輔助有人直升機作戰體系流程設計和作戰指揮控制給予有效的支撐。
1作戰體系結構設計
1.1 DoDAF建模思想
該種體系架構建模思路主要分為兩步:第一步將整個作戰體系模型的構建劃分為易于區分的幾個階段;第二步按照作戰階段中各階段側重點解決不同的建模問題。這種方法的優點是逐步推進系統模型的構建,減少了整套系統模型設計的難度,便于清晰地獲得每一步的工作重點,使得整個建模過程更加簡單明了,容易被各行各業工作人員快速掌握[3]。各個工作階段都明確確立了任務完成的目標和要求,一旦發生問題,立刻就在當前階段處理消除,進行最終的仿真驗證[4],而不必等到所有工作完成,通過“化整為零”的方法提高設計效率。
1.2 作戰體系結構輸出成果
DoDAF體系結構根據需要定義了一系列的標準視圖,即輸出產品。從各個維度體現參與作戰的各方系統信息的組織架構。對無人直升機輔助有人直升機反潛作戰體系進行設計的主要任務是描述整個作戰系統支持的作戰體系概念,這種作戰概念的主要內容包括完成無人直升機反潛任務的活動、參與人員之間的數據流通、體系關鍵要素等,表1列出了主要作戰視圖產品。
1.3作戰體系結構設計
整個作戰體系結構產品之間相互關聯,并且相互依賴。因此,可按照以下步驟進行作戰體系結構設計[5]。
(1)確立高級作戰概念圖(OV-1)。高級概念圖是用文字或圖形對相關內容進行描述的一種方式,有利于高級決策者之間進行交流。圖形化的描述作戰想定過程,分析作戰概念、作戰使命等。
(2)明確作戰節點、作戰活動和組織指揮關系。包括OV-2、OV-5和OV-4。OV-2包含作戰節點、連接關系以及信息交互要求等內容;OV-5則是對主要作戰活動的層次關系以及作戰活動相互間的輸入、輸出關系進行描述和闡明;OV-4的主要目的則是對組織、組織類型、人員角色以及它們間的指揮關系進行描述。
(3)確定作戰事件,即OV-6c。OV-6c是用來描述在特定的作戰場景下,作戰節點間的信息交換隨時間的變化過程。
(4)確定單個節點內部狀態轉移關系,即OV-6b。OV-6b是用于描述單個作戰節點的響應,描述單個作戰節點在不同的作戰事件影響下,其允許的作戰狀態及狀態轉移過程。
表1 DoDAF作戰視圖產品及相關說明
|
產品 |
名稱 |
說明 |
表述形式 |
|
OV-1 |
高級作戰概念圖 |
圖形化的描述作戰想定過程,分析作戰概念 |
概念圖 |
|
OV-2 |
作戰節點連接圖 |
從邏輯上描述作戰活動主要是由哪些作戰節點完成的 |
類圖 |
|
OV-4 |
組織關系圖 |
描述節點間交換的信息和有關屬性 |
類圖 |
|
OV-5 |
作戰活動模型 |
描述整個作戰過程主要經過了哪些,作戰活動、活動之間的關系 |
活動圖 |
|
OV-6b |
作戰狀態轉換圖 |
描述響應事件的業務過程 |
狀態圖 |
|
OV-6c |
作戰事件跟蹤描述 |
映射作戰想定或事件序列中的行動 |
順序圖 |
2 輔助反潛作戰體系結構建模設計與驗證
無人直升機輔助有人直升機反潛的作戰流程是:艦隊指揮平臺派遣一架無人直升機到可疑區域,利用磁探儀等設備對敵潛艇進行精準探潛,當探測到敵潛艇的目標信息時,無人直升機將目標信息通過衛星發送給艦船指揮平臺,艦船指揮平臺在接收到目標信息后,通過衛星向無人直升機以及反潛直升機發送任務命令,無人直升機根據接收到的命令,組織通信預案,向反潛直升機發送目標指示信息。與此同時,反潛直升機接收到指揮平臺發送的經處理過的敵潛艇指示信息,根據艦船指揮平臺發送的處理后的敵潛艇指示信息以及無人直升機發送的目標指示信息,對目標實施打擊。
2.1 模型的設計
本文依據無人直升機輔助有人直升機反潛作戰需求,基于DoDAF開發模型的規律,制定作戰模型開發步驟。
(1)高級作戰概念圖OV-1
在本設計中,OV-1是對無人直升機輔助有人直升機反潛作戰的一種高層次的圖形描述。它宏觀地描述了輔助反潛的作戰過程,便于各層次設計者之間的交流,根據作戰流程的描述,在輔助反潛作戰體系中,主要參與者有無人直升機、艦隊指揮平臺、反潛直升機、衛星、敵潛艇。其高級作戰概念圖如圖1所示。
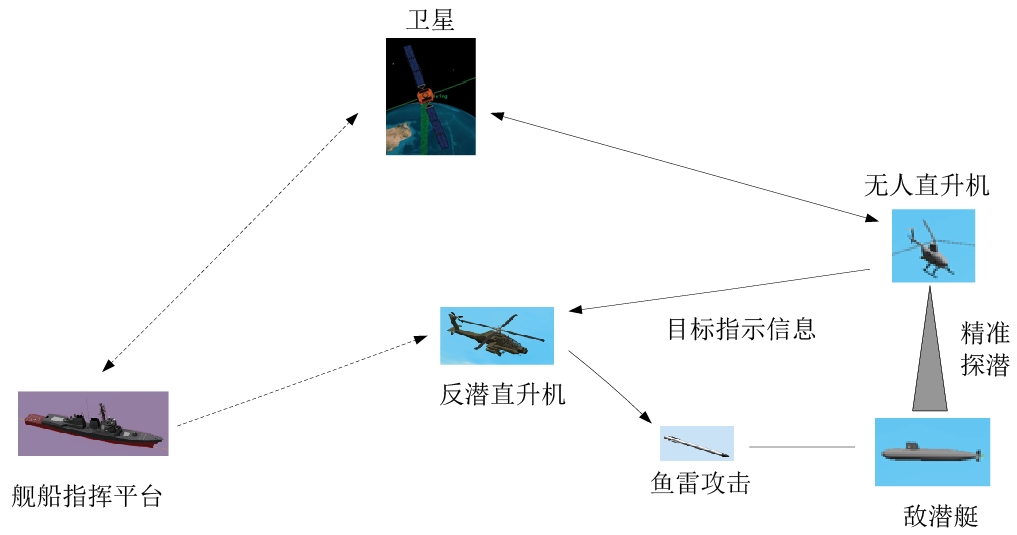
圖1 OV-1高級作戰概念圖
(2)組織關系圖OV-4
本研究場景中主要組織角色有:艦船指揮平臺、衛星、反潛直升機、無人直升機等,其中艦船指揮平臺是本輔助反潛場景作戰活動的組織者,其他組織角色均為該平臺指揮者(除敵潛艇外),故其組織角色如圖2所示。
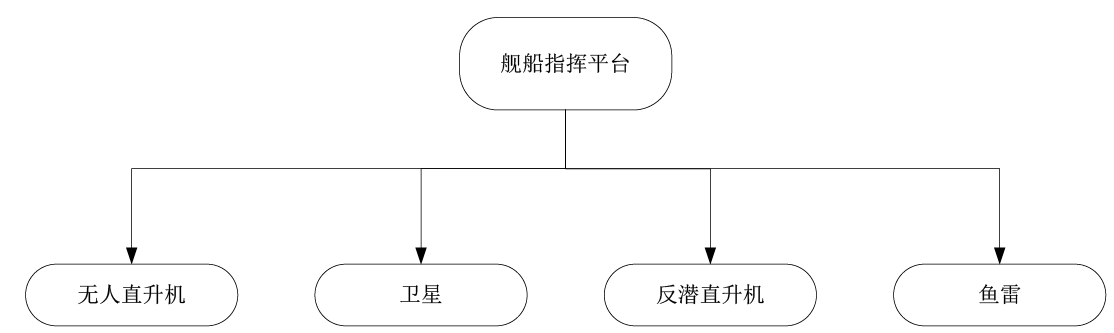
圖2 OV-4組織關系圖
(3)作戰活動模型OV-5
OV-5主要研究內容為無人直升機輔助有人直升機反潛時,整個作戰體系內所包含的作戰要素以及作戰活動之間的關系。無人機作戰能力、各個作戰活動之間數據流交互是它的主要內容,并且數據流的去向、作戰活動的前后順序和相互關系都是它要描述的主要內容。由本場景可知,其作戰主要活動為精準探潛、作戰指揮和魚雷打擊3個活動,3個活動又可劃分為探測目標、發送目標指示信息、命令決策、目標指令、火控解算、接收指令、打擊7個二級子活動,由此建立的作戰活動模型如圖3所示。
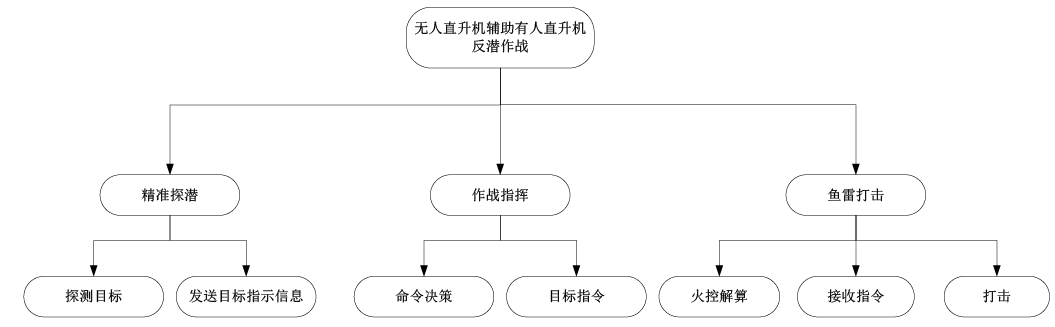
圖3 OV-5作戰活動模型
(4)作戰節點連接圖OV-2
根據OV-5確定OV-2,根據本作戰場景,主要作戰節點含衛星節點、指揮節點和反潛節點等,作戰節點間的連接關系和信息交互主要是命令指令和情報上報。OV-2清晰地表述衛星節點、指揮節點和反潛節點之間的命令指令和情報上報信息,如圖4所示。
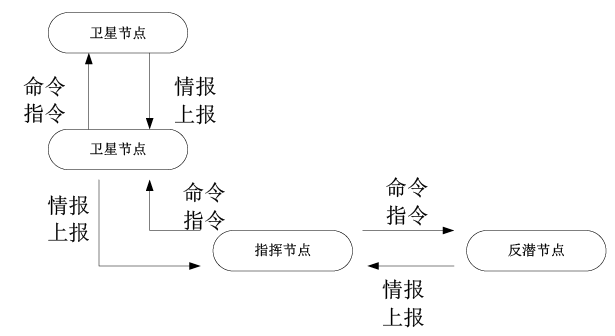
圖4 OV-2作戰節點連接圖
(5)作戰事件跟蹤描述圖OV-6c
OV-6c定義了作戰事件的跟蹤描述,描述各主要作戰節點在整個作戰過程中信息動態的時序邏輯[6]。OV-6c在本研究中定義了無人直升機輔助有人直升機反潛作戰中各個作戰節點間的信息交換活動的任務事件序列,如圖5、圖6所示。
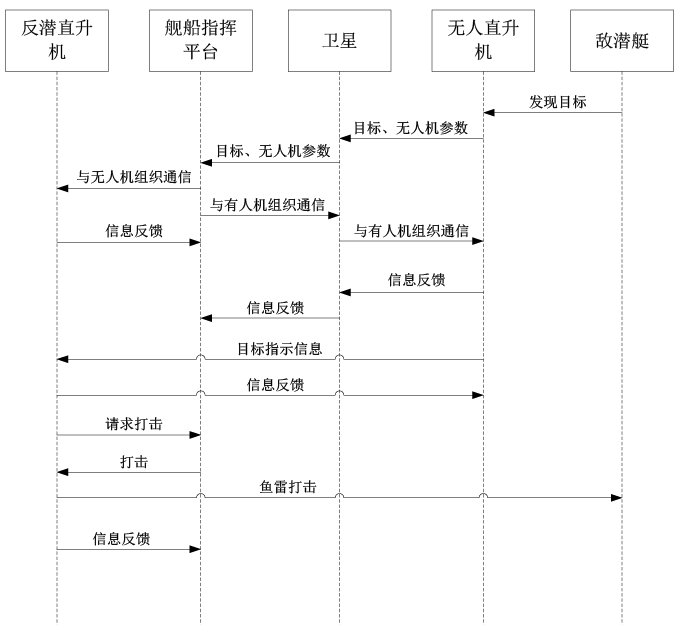
圖5 作戰事件跟蹤描述圖OV-6c(邏輯關系)
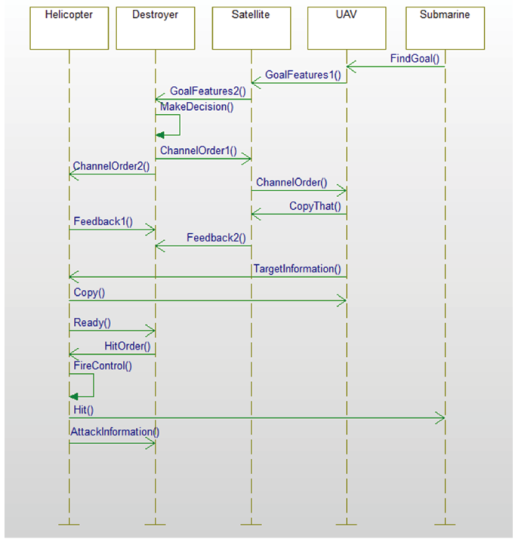
圖6 OV-6c作戰事件跟蹤描述圖(DoDAF描述)
(6)作戰狀態轉換描述OV-6b
作戰狀態轉換描述主要是通過圖形的方法描述作戰節點相應的狀態變化,可把輔助探潛主要作戰活動的順序清晰地描述出來,作戰場景中每個對象都對應著一個OV-6b,本研究僅列出艦載指揮中心的OV-6b,如圖7所示。
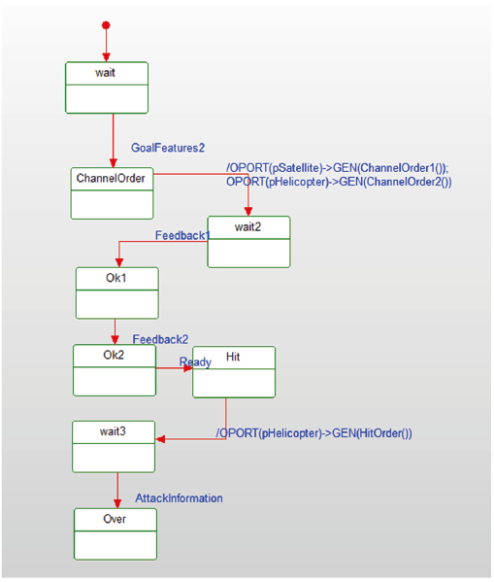
圖7 艦船指揮中心作戰狀態轉換描述OV-6b
2.2模型的驗證
將無人機輔助反潛作戰體系結構模型導入DoDAF模型驗證工具進行對比驗證,對比模型驗證工具中流程的實際運行狀態與預期的作戰流程是否一致,以一致性結果的吻合度來判斷無人機輔助反潛模型設計是否合理[7]。實驗中將設計好的作戰狀態模型OV-6b和OV-6c導入到體系結構模型驗證工具中,并定義相關消息驅動,運行后得到如圖8所示的時序圖。從運行時序圖看出,軟件運行結果的邏輯與作戰事件跟蹤描述OV-6c預期一致,符合無人直升機輔助有人直升機反潛作戰系統軍事需求和設計需求。
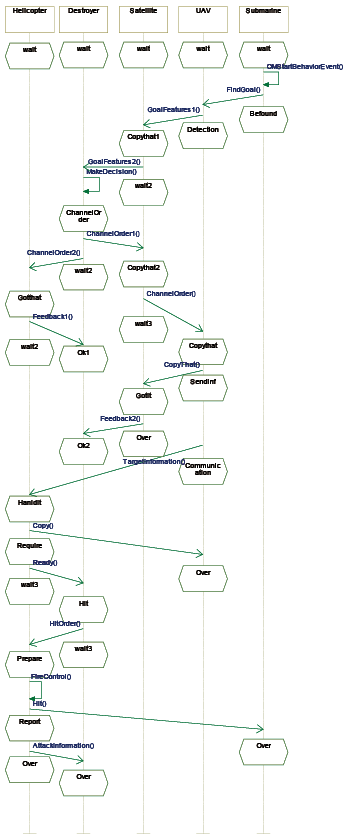
圖8 運行結果時序圖
3 結語
在對美國國防部體系結構框架深入研究的基礎上,完成了無人直升機輔助有人直升機反潛作戰系統作戰視圖的分析與設計,闡明了無人直升機輔助有人直升機反潛作戰系統的角色、組成、活動,并進行動態仿真來驗證模型,結果表明該方法合理可行。基于該方法建立的模型易于理解,有助于為無人直升機輔助反潛作戰方式的流程設計和風險規避提供技術支撐,為無人直升機反潛技術的發展提供一定的參考。
參考文獻
[1] 王新堯,曹云峰,孫厚俊,等.基于DoDAF的有人/無人機協同作戰體系結構建模[J].系統工程與電子技術,2020,42(10):2265-2274.
[2] 王瑛,史翔宇,李超,等.基于DoDAF的無人機協同作戰效能評估[J].空軍工程大學學報(自然科學版),2020,21(6):66-72.
[3] 王偉,徐照磊,王曉楠.基于DODAF的網格環境下虛擬組織認證系統體系結構建模[J].計算機安全,2011,(12):2-6.
[4] 潘星,尹寶石,溫曉華,等.基于DoDAF的裝備體系任務建模與仿真[J].系統工程與電子技術,2012,34(9):1846-1851.
[5] 張少兵,郭忠偉,錢曉進.基于DoDAF的防空兵指揮信息系統作戰體系結構[J].2011,30(3):18-20.
[6] 戎光,劉新發,夏惠城.基于DoDAF的大型水面艦艇編隊防空反導系統作戰體系結構[J].艦船電子對抗,2012,35(6):22-25.
[7]陳巖,王紅,譚賢四,等.基于可執行模型的DoDAF體系結構驗證[J].火力與指揮控制,2013,(11):99-103.
收稿日期:2023-01-11
作者簡介:李恒(1992—),男,河南南陽人,碩士研究生,工程師,研究方向:直升機總體設計。
Modeling and Analysis of Unmanned Helicopter Assisted Anti-submarine Warfare System Based on DoDAF
LI Heng
(China Helicopter Design and Research Institute, Jingdezhen Jiangxi 333001)
Abstract:In this paper, a DoDAF-based unmanned helicopter assisted anti-submarine warfare system model is proposed based on the in-depth study of DoDAF architecture modeling ideas and theories. By analyzing the meaning and relationship of the combat system structure product, the concrete system modeling steps are given to complete the modeling. Dynamic simulation is carried out to verify the model, and the results show that the method is reasonable and feasible. This method is helpful to promote the process design and risk avoidance of unmanned helicopter assisted anti-submarine warfare mode, and provides a certain reference for the development of unmanned helicopter anti-submarine technology.
Key words:DoDAF;unmanned helicopter;auxiliary antisubmarine
