
- 熱點文章
-
- 09-14關于高等職業(yè)院校弱電專業(yè)教改的探索
- 11-28東芝將在2009年CES帶來新水平的前沿技術
- 11-28互聯(lián)網:世界的鏡子
- 11-28中美文化論壇研討數字技術保護文化
- 11-28淺析“三鹿集團奶粉事件”危機根源
- 11-28新媒體的發(fā)展及其教育創(chuàng)新應用研究
- 11-28樓宇信息系統(tǒng)的現(xiàn)狀與應用以及發(fā)展趨勢
- 11-28中國2009世界郵展60城市巡郵漯河站啟動
- 11-28打造煥發(fā)生命活力的教育時空
- 11-28觀察中國管理教育30年
- 11-28駕馭論:科學發(fā)展的新智囊
- 11-28軟著陸將解讀中國管理國際化新走勢
- 11-28創(chuàng)建中國水電國際化強勢品牌
- 11-28管理科學進入新觀察時代
- 11-28全球化傳播語境下的家國建構
- 11-28網絡民主對公民社會建設的影響研究
- 11-28奧運后中國酒店業(yè)的發(fā)展分析
- 11-28國家創(chuàng)新系統(tǒng)下的大學科研管理研究
- 11-28高校數字圖書館建設及服務模式探討
- 11-28非均衡理論及我國房地產市場供求
- 11-28綠色、安全和通訊是汽車電子的未來
- 11-28敦煌莫高窟將為游客建"數字洞窟"
- 11-28思科新軟件平臺幫媒體公司建社交網絡
- 11-28蘋果喬布斯:用13年給IT業(yè)洗一次腦
- 11-28海外傳真:2008年數字印刷市場回顧
- 11-28東芝將在2009年CES帶來新水平的前沿技術
- 11-28互聯(lián)網:世界的鏡子
- 11-28中美文化論壇研討數字技術保護文化
- 11-28故宮國圖面臨“數字化”難題 缺乏專門人才
城市軌道交通車輛360°動態(tài)圖像檢測系統(tǒng)設計與研究
2023-10-17 10:45:00 來源:優(yōu)秀文章
摘要:介紹城市軌道車輛360°動態(tài)圖像檢測系統(tǒng)主要功能及基本結構,根據運用場景需求進行硬件和軟件框架設計。
關鍵詞:圖像檢測系統(tǒng);在線動態(tài)檢測;城市軌道交通車輛
中圖分類號:U266.2 文獻標識碼:B 文章編號:1671-2064(2023)13-0052-04
0 引言
隨著我國城市軌道交通運營線路不斷增多,城市軌道車輛運用安全保障工作變得越來越復雜,中國鐵路總公司印發(fā)了《車輛專業(yè)安全監(jiān)控技術發(fā)展規(guī)劃》[1]。
設計一種安裝在入段走行線(或正線)上,實現(xiàn)車輛進場(通過)時在線動態(tài)檢測車輛外觀和車輛可視部件狀態(tài)的360°圖像檢測系統(tǒng)。在車輛通過設備檢測區(qū)時,采用高速、高分辨率的線陣相機和3D相機對車輛車頂、車底和車側的可視部件進行2D、3D圖像采集,針對關鍵部件的變形、缺失、異物等異常狀態(tài)進行自動識別預警,代替部分人工檢測,提高檢測效率和檢測質量[2]。
1 360°圖像檢測系統(tǒng)主要功能
(1)圖像采集,使用2D線陣相機和2D+3D組合相機對車體進行360°全覆蓋拍照,以采集車體表面可視部件的圖像信息,用于對車體外觀和可視部件的缺陷進行識別。
(2)車號采集,當車輛接近檢測區(qū)時,通過判斷接車磁鋼檢測到的信號,車輛信息采集機控制車號采集單元開啟,車輛信息采集機根據車速和車號位置信息進行預判,當車輛接近和通過車號采集單元拍攝區(qū)時觸發(fā)抓拍。
(3)圖像傳輸與存儲,線陣采集機和面陣采集機采集到圖像信息后,通過圖像傳輸子程序將圖像數據傳輸到數據管理服務器進行存儲和圖像識別。
(4)故障識別,采用機器視覺和圖像識別技術對采集到的圖像信息與標準樣本進行比對,識別出車輛的異常狀態(tài),識別范圍包括但不限于螺栓松動、缺失,部件的變形、移位、缺失和異物入侵。
(5)接車與送車,采用磁鋼作為檢測車輪的傳感器,當磁鋼感應到有車輪經過時產生感應信號,由此判斷是否有車輛通過。
(6)車速測量與計軸計輛,測速模塊計劃采用磁鋼模式。磁鋼3#與磁鋼4#間距為270±2mm,兩組磁鋼的功能是實現(xiàn)列車測速和計軸計輛。
(7)關鍵部件尺寸檢測,系統(tǒng)能夠采集集電靴滑板厚度和姿態(tài)的 3D 點云數據,利用3D點云數據的深度信息通過計算可以檢測集電靴碳滑板的姿態(tài)、磨耗、破損、斷裂等異常情況。
(8)閘瓦磨耗、撒砂管和排障器高度,軌底沉箱和左下、右下設備箱中的圖像采集模塊可拍攝到閘瓦圖片,根據線陣相機的2D圖像和面陣相機得到的3D信息,分析得到閘瓦表面的3D模型,通過處理算法計算得到閘瓦的磨耗值。
2 360°圖像檢測系統(tǒng)基本組成
360°圖像檢測系統(tǒng)由數據采集裝置、控制分析裝置、客戶終端3部分組成,如圖1所示。
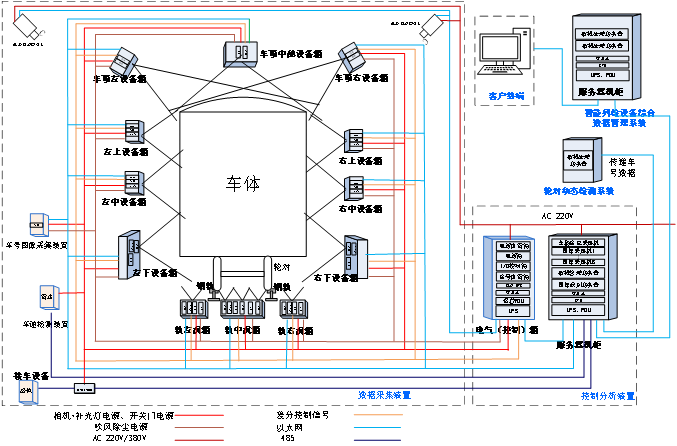
圖1 360°圖像檢測系統(tǒng)框圖
2.1數據采集裝置
數據采集裝置安裝于軌底和軌邊,實現(xiàn)數據采集功能。數據采集裝置包含車輛接近觸發(fā)開關、圖像采集模組、吹風除塵(除霧)設備、車速檢測裝置、車號圖像采集裝置和安防系統(tǒng)等其他單元。
2.2控制分析裝置
控制分析裝置既可安裝在軌旁,也可以安裝在離數據采集裝置較近的現(xiàn)場設備間,實現(xiàn)數據采集裝置的供電、控制、數據和圖像的采集控制、分析處理、存儲,同時與智能列檢設備綜合數據管理系統(tǒng)進行通訊。控制分析裝置由配電設備、控制設備、工控機、數據處理和分析服務器、通信設備、UPS、PDU、電源和信號防雷裝置等設備組成。其中服務器機柜內放置工控機、數據處理和分析服務器、通信設備、數據存儲設備等信號數據類設備,其余配電設備放置于電氣控制柜內[3-4]。
2.3客戶終端
客戶終端位于遠程控制室,是系統(tǒng)的控制中心、數據管理中心和監(jiān)控中心,由控制機及其外圍設備構成。在遠程控制中心,可以設置系統(tǒng)參數,查看、統(tǒng)計、分析、打印檢測數據[5],監(jiān)控設備的運行狀態(tài)和檢測過程,如圖2、圖3所示。
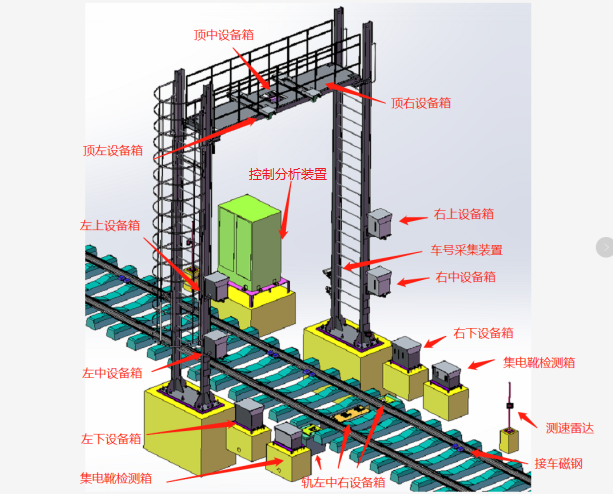
圖2 檢測設備三維布局設計

圖3檢測設備現(xiàn)場安裝
3檢測系統(tǒng)關鍵部件硬件設計
3.1車底圖像采集設備
車底圖像采集單元分為軌左沉箱、軌中沉箱和軌右沉箱,沉箱中安裝2D+3D組合的圖像采集模塊,共同完成車底可視部件的圖像采集。采集的圖像用以檢測識別車底異物、螺栓松動、螺栓缺失、劃痕、線纜捆扎松脫等缺陷[6]。
3.2車側圖像采集設備
車側圖像采集設備主要由左下設備箱、右下設備箱、左中設備箱、右中設備箱、左上設備箱、右上設備箱和第三軌受流的左右集電靴檢測設備箱組成。左下設備箱和右下設備箱的圖像采集模塊為2D-4K+3D相機,主要對車體轉向架、裙擺等區(qū)域進行圖像采集。檢測轉向架區(qū)域是否有異物、螺栓缺失、螺栓松動等故障缺陷。左中、右中、左上和右上設備箱的圖像采集模塊為2D-2k相機,主要對側面車體、車窗區(qū)域進行圖像采集。集電靴檢測設備箱的圖像采集模塊為3D相機。
3.3車頂圖像采集設備
車頂圖像采集設備是對車輛頂部進行圖像采集。采集的圖像用以檢測車頂是否有異物、車頂空調外罩螺釘是否缺失等情況。車頂圖像采集設備分為車頂左、中、右設備箱。車頂左右設備箱內采用3D相機,車頂中設備箱采用2D-4K相機,共同完成車頂2D和3D數據采集。由于安裝在車頂上,采用從上往下的拍攝角度,設備箱不再設置開關門防護。控制原理與軌底沉箱相同,圖像采集模塊系數如表1所示。
表1 圖像采集模塊參數
|
|
軌底沉箱2D+3D圖像采集模塊技術參數 |
左(右)設備箱2D+3D圖像采集模塊技術參數 |
受流器3D圖像采集模塊技術參數 |
車頂側設備箱3D圖像采集模塊技術參數 |
|
供電電壓 |
DC24V |
DC24V |
DC24V |
DC24V |
|
相機最大像素 |
2048(線陣)、2048×1152(面陣,可開窗) |
4096(線陣)、1280×864(面陣,可開窗) |
2048×1152(面陣,可開窗) |
2048×1152(面陣,可開窗) |
|
景深范圍 |
不低于1100mm(滿足車輛底部拍攝要求) |
不低于1100mm(滿足車側走行部拍攝要求) |
不低于500mm(滿足受流器拍攝要求) |
不小于600mm(滿足車頂拍攝要求) |
|
最大尺寸測量誤差 |
±2.5mm |
±2.5mm |
±1mm |
±2.5mm |
|
滑板有效檢測長度 |
|
|
400mm |
|
3.4車號采集設備
系統(tǒng)安裝車號圖像采集設備用以采集車輛的車號和端位信息。車號采集設備可根據系統(tǒng)控制信號拍攝車輛的車號和端號圖片,通過設備集成的圖像識別軟件輸出車號和端號信息。車號采集設備考慮夜間黑暗環(huán)境的拍攝情況,自帶補光設備。車號采集設備技術參數如表2所示。
表2 車號采集設備技術參數
|
|
車號采集設備技術參數 |
|
供電電壓 |
DC24V |
|
圖像像素 |
不低于300萬 |
|
識別準確率 |
不低于99% |
|
數據通信接口 |
千兆以太網 |
|
控制信號接口 |
支持差分信號(±6V)或內觸發(fā) |
|
防水防塵等級 |
IP67 |
3.5車速檢測設備
車速檢測設備主要由雷達組成,雷達實時采集過車速度,車輛信息采集機根據車速信息,通過計算后給出用來觸發(fā)圖像采集設備的采集頻率控制信號。雷達具體性能要求如表3所示。
表3 雷達技術參數
|
|
雷達技術參數 |
|
供電電壓 |
DC 24V |
|
測量范圍 |
5km/h~120km/h |
|
分辨率 |
0.1km/h |
|
測速誤差 |
不高于1% |
|
數據刷新 |
不小于10次/秒 |
|
安裝角度 |
10°~40° |
4 檢測系統(tǒng)軟件部分
如圖4所示,360°圖像檢測系統(tǒng)軟件層次結構主要可分為3個軟件,分別為綜合應用軟件、數據采集軟件、圖像識別軟件。在這些軟件下還包含具體的功能單元,即綜合應用軟件包含系統(tǒng)控制、設備運行狀態(tài)監(jiān)測、車速值采集、車號信息采集并轉發(fā)和數據管理,數據采集軟件包含原始圖像采集、相機運行狀態(tài)監(jiān)測和圖像數據傳輸,圖像識別軟件包含圖像拼接、故障識別、故障標識,各個軟件間根據通信協(xié)議進行通信和數據交互,各功能單元間相互獨立,降低軟件間的耦合度,保證系統(tǒng)運行的穩(wěn)定可靠,并提高系統(tǒng)的可維護性和擴展性[7]。
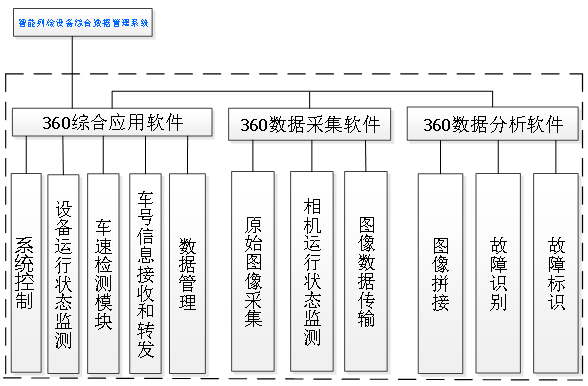
圖4圖像檢測系統(tǒng)軟件層級結構
5性能及參數設計分析
5.1車底圖像采集設備參數計算
車底圖像采集設備主要由軌左沉箱2D+3D模塊、軌中沉箱左側2D+3D模塊、軌中沉箱中部2D+3D模塊、軌中沉箱右側2D+3D模塊、軌右沉箱2D+3D模塊組成,底部所有模塊視覺設計方案相同。
2D+3D視覺模塊采用1個線陣、1個面陣、2個不同波段線激光的方式采集車底可視部件的圖像。單個模塊2D圖像采用2k線陣相機,采用12mm鏡頭,2D圖像典型分辨率達到0.5mm/像素。
3D圖像部分采用1個面陣相機、1個線結構光、1個6mm鏡頭,平面方向成像分辨率為1280mm,此時平面圖像精度約1mm,深度方向平均分辨率約為6mm。
5.2 車側圖像采集設備參數計算
車側圖像采集設備主要包括左下設備箱2D+3D模塊、右下設備箱2D+3D模塊、左中設備箱2D模塊、右中設備箱2D模塊、左上設備箱2D模塊、右上設備箱2D模塊。其中,左下設備箱2D+3D模與右下設備箱2D+3D模塊視覺設計方案相同。左中設備箱2D模塊、右中設備箱2D模塊、左上設備箱2D模塊、右上設備箱2D模塊視覺方案設計相同。
左下設備箱2D+3D模塊采用二組1個線陣、1個面陣、2個不同波段線激光方式采集轉向架圖像。單個左下設備箱2D模塊采用4k高清線陣相機,采用25mm鏡頭,系統(tǒng)單位像素精度達到0.25mm。
單個3D圖像采用1個面陣相機、1個線結構光、1個12mm鏡頭,平面方向成像分辨率為1280mm,此時平面圖像精度約1mm,深度方向平均分辨率約為6mm。
左中設備箱2D模塊采用2k高清線陣相機,采用8mm鏡頭,系統(tǒng)單位像素精度達到1mm,車頂圖像采集設備參數計算。
車頂圖像采集設備主要包括車頂左設備箱3D模塊、車頂中部設備箱2D模塊、車頂右設備箱3D模塊。
車頂中部設備箱2D模塊采用1個線陣相機,1個線激光方式采集車頂圖像,采用4K高清線陣相機,25mm鏡頭,系統(tǒng)單位像素精度達到1mm。
頂部左右設備箱3D模塊采用1個面陣相機、1個線激光、1個12mm鏡頭的方式檢測車體頂部外觀缺陷故障。平面方向成像分辨率為1280mm,此時平面圖像精度約2mm,深度方向平均分辨率約為6mm。
5.3集電靴圖像采集設備參數計算
集電靴圖像采集設備使用3D模塊對集電靴進行檢測。
集電靴檢測模塊采用1個面陣相機,1個線激光方式檢測集電靴故障,使用12mm鏡頭,平面方向成像分辨率為1280mm,此時平面圖像精度約1mm,深度方向平均分辨率約為4mm。成像示意圖如圖5、圖6所示。
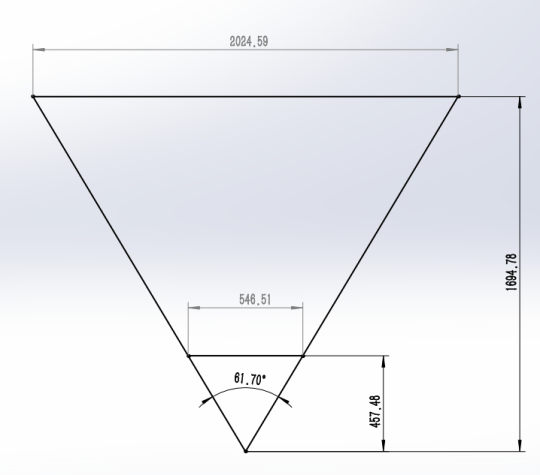
圖5 線陣成像示意圖
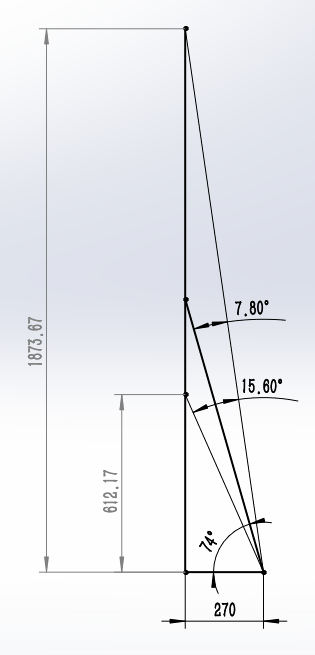
圖6 面陣成像示意圖
6 運用效果
360°圖像檢測系統(tǒng),從2022年3月至2022年10月,自動采集車頂、車側、車底可視部件的高清圖像,通過圖像分析識別,對車頂受電弓、車側車門、車側車窗、車底箱體、牽引電機、制動器、齒輪箱、軸箱、輪對等關鍵部位缺失、變形、損傷等異常情況進行檢測并報警提示;故障檢出率:車頂受電弓部分≥85%,轉向架部分≥85%,轉向架部分≥85%,制動系統(tǒng)部分≥85%,其他車下部件≥85%。
參考文獻
[1] 歐海霞.城市軌道交通列車風源系統(tǒng)智能模塊的設計[D].長沙:湖南大學,2012.
[2] 馮江華.軌道交通裝備技術演進與智能化發(fā)展[J].控制與信息技術,2019,(1):1-6,11.
[3] 蔣利容.機車底部故障圖像識別技術研究[D].成都:西南交通大學,2013.
[4] 方素平,夏曉華,肖燕,等.一種線陣相機鏡頭畸變的標定方法[J].西安交通大學學報,2013,47(1):11-14.
[5] 肖齊.鐵路客車故障軌旁圖像監(jiān)測系統(tǒng)(TVDS)統(tǒng)型機設計及運用[J].鐵道機車車輛,2018,38(1):43-45,49.
[6] 李偉,李言義,張雄飛,等.地鐵車輛車輪多邊形的機理分析[J].機械工程學報,2013,49(18):17-22.
[7] 詹偉,徐永能,王依蘭.城市軌道交通車輛智能運維系統(tǒng)應用研究[J].城市公共交通,2018,(12):28-31,36.
The Design and Research of 360 ° Dynamic Image Detection System for Urban Rail Transit Vehicles
YANG Zhenghua
(CRRC Zhuzhou Electric Locomotive Research Institute Co., Ltd., Zhuzhou Hunan 412001)
Abstract:The paper introduces the main functions and basic structure of the 360° dynamic image detection system for urban rail vehicles, and designs the hardware and software framework according to the requirements of the application scenario.
Key words:image detection system;online dynamic detection;urban rail transit vehicles
