
- 熱點文章
-
- 09-14關于高等職業院校弱電專業教改的探索
- 11-28東芝將在2009年CES帶來新水平的前沿技術
- 11-28互聯網:世界的鏡子
- 11-28中美文化論壇研討數字技術保護文化
- 11-28淺析“三鹿集團奶粉事件”危機根源
- 11-28新媒體的發展及其教育創新應用研究
- 11-28樓宇信息系統的現狀與應用以及發展趨勢
- 11-28中國2009世界郵展60城市巡郵漯河站啟動
- 11-28打造煥發生命活力的教育時空
- 11-28觀察中國管理教育30年
- 11-28駕馭論:科學發展的新智囊
- 11-28軟著陸將解讀中國管理國際化新走勢
- 11-28創建中國水電國際化強勢品牌
- 11-28管理科學進入新觀察時代
- 11-28全球化傳播語境下的家國建構
- 11-28網絡民主對公民社會建設的影響研究
- 11-28奧運后中國酒店業的發展分析
- 11-28國家創新系統下的大學科研管理研究
- 11-28高校數字圖書館建設及服務模式探討
- 11-28非均衡理論及我國房地產市場供求
- 11-28綠色、安全和通訊是汽車電子的未來
- 11-28敦煌莫高窟將為游客建"數字洞窟"
- 11-28思科新軟件平臺幫媒體公司建社交網絡
- 11-28蘋果喬布斯:用13年給IT業洗一次腦
- 11-28海外傳真:2008年數字印刷市場回顧
- 11-28東芝將在2009年CES帶來新水平的前沿技術
- 11-28互聯網:世界的鏡子
- 11-28中美文化論壇研討數字技術保護文化
- 11-28故宮國圖面臨“數字化”難題 缺乏專門人才
一套基于直升機平臺的伏爾導航系統飛行試驗技術研究
2023-07-31 11:31:00 來源:優秀文章
摘要:簡要介紹了飛行器導航臺的發展歷程,詳細介紹了一套基于直升機平臺上的伏爾導航系統的組成和功能,介紹了某型機新增的伏爾導航設備試飛前的準備工作、試飛內容和試飛結果,并對試飛結果進行分析,給出對于伏爾導航系統的飛行試驗的建議,為其他飛行器的伏爾導航設備飛行試驗提供參考。
關鍵詞:直升機;試飛技術;伏爾導航系統
中圖分類號:V243.1 文獻標識碼:B 文章編號:1671-2064(2023)07-0059-04
0.引言
最初的飛行器在天空中飛行時,需要通過目視的方法記錄各航線之間的建筑物、河流、山脈、鐵路、公路等標志性的地標來達到不迷失方向的目的,但是該方法受到的局限性很大,經常會發生飛行器因為丟失目標而失去方向的情況出現。為此,科學家們發明了無線電導航臺,讓飛行器從目視飛行跨越到了儀表飛行。
1920—1930年,第一代的無線電導航臺NDB臺被廣泛應用于飛行器的飛行過程中,NDB臺又稱歸航臺,是一種與機載ADF接收機相配合的地面導航臺。NDB全稱是無指向性無線電信標,是設置在地面上的通訊裝置,可以使用190kHz~1750kHz帶,配合機載ADF接收機可以用來顯示機首與地面上的角度。但是,由于NDB導航方式的自身限制,容易受到地形地貌的影響,會發生較大誤差,精度不夠準確[1],并且傳播距離相對較短且無法判斷距離,因此隨之發展了新的導航技術VOR導航臺。VOR臺全稱甚高頻全向信標臺,是利用測角原理工作的近程無線電導航系統。VOR臺工作頻率為108MHz~118MHz的甚高頻段,會向機上發射兩種信號:一種是相位固定的基準信號,另一種是信號的相位隨著圍繞信標臺的圓周角度連續變化,因此,各個角度發射不同的相位的信號[2]。飛行器上的VOR接收機通過計算接收到的兩個不同相位的信號,即可得出飛行器所處的信標臺的發射角度,從而得知自身的方位信息。同樣,當只有一臺VOR臺時,只能得出飛行器的方位信息,不能提供距離信息。理論是兩套VOR系統就可以確定飛行器的位置信息,達到既能判斷方位又能知道距離的目的,但是由于VOR系統的遠距離方位誤差較大,因此需要配合DME測距機使用。DME測距機是一種非自主的脈沖式近程測距導航系統,通過測量無線電波在空間中的傳播時間來獲取距離信息[3]。當飛行器距離著陸機場比較近時,使用ILS儀表著陸系統可以使飛行器在低天氣標準或者飛行員看不到任何目視參考的天氣下進行引導飛行器進場著陸。ILS儀表著陸系統又稱為盲降系統,顧名思義其作用是在飛行員無法肉眼看清跑道的情況下操縱飛行器降落[4]。
1.一套直升機伏爾導航系統試飛
1.1 伏爾導航系統的組成和工作原理
本文介紹的一套伏爾導航系統由VOR臺、DME臺和ILS儀表著陸系統組成,主要用于直升機的航路導航及進場著陸引導,使其具備儀表著陸系統(ILS)功能、伏爾(VOR)功能、指點信標功能。
甚高頻全向信標(VHF Omini-Range)是一種由地面信標臺和機載接收指示設備兩部分組成的相位測角系統,該系統能夠作用的最大距離為200海里,優于1.4°測角精度。VOR地面臺雖然能全方位發射指點信標,但是存在天線正上方的盲區,因此,在飛行經過地面信標臺的正上方時會出現短暫的指點信標信號丟失的現象。甚高頻全向信標簡稱為VOR,其工作頻率為108MHz~118MHz,VOR系統的工作示意圖如圖1所示[5]。
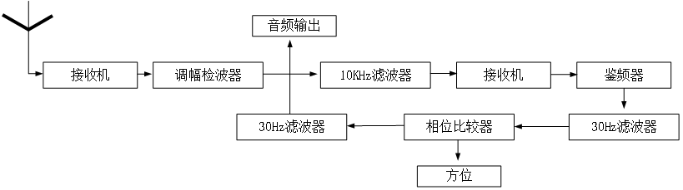
圖1 VOR系統工作原理圖
DME導航臺是一種非自主的脈沖式近程測距導航系統,其覆蓋范圍在200海里以上。DME導航臺通過測量無線電波在空間的傳播時間來獲取距離信息,由機載詢問器和地面臺兩部分組成,機上設備發射詢問脈沖,被地面臺接收,經過固定時間的延時,地面臺向機上詢問器發射信號,機上設備收到應答信號后可通過發射和應答信號之間的時間間隔計算詢問器和應答器之間的距離,即為飛行器距離地面臺的距離。具體工作原理如圖2所示。
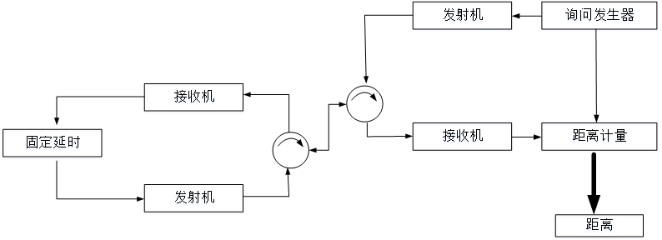
圖2 DME系統工作原理圖
ILS儀表著陸系統經過近60年的發展和完善,已然成為全世界通用的著陸設備。ILS儀表著陸系統由航向臺、下滑臺和指點信標臺3部分組成,其中指點信標臺又分為內指點信標、中指點信標、外指點信標3種信標臺。航向臺安裝在距離跑道末端500m的跑道中心延長線上,與跑道中心組成一個鉛垂面。下滑臺安裝在距離跑道中心150m的跑道一側,與跑道平面組成一個3°左右的相交傾斜面,得出符合要求的下滑線[6]。內指定信標臺安裝在距離跑道入口75m~300m處且垂直跑道延長線方向偏離不超過30m,中指點信標臺安裝在距離跑道入口900m~1200m處且垂直跑道延長線方向偏離不超過70m,外指點信標臺安裝在距離跑道入口6.5km~11.1km處且垂直跑道延長線方向偏離不超過70m[7]。
1.2 一套基于直升機平臺的伏爾導航系統試飛
1.2.1 試飛前的準備工作
試飛前需進行對直升機上新增的儀表著陸系統(ILS)、甚高頻全向信標(VOR)、近程測距導航系統(DME)進行改裝可行性分析、重量重心影響分析、電源容量分析、結構強度分析、電磁兼容分析和六性分析等工作,使新增加的伏爾導航系統滿足設計要求,能夠達到預定的功能且不影響原直升機平臺。在試飛前需要對伏爾導航系統進行航電系統地面聯試和電磁兼容性試驗,確保各系統工作正常,與之相交聯的其他系統工作也正常,不會對直升機上其他平臺進行干擾。對試飛的機場的選取也很重要,對于進行伏爾導航系統試飛的機場需要滿足以下條件。
(1)告警系統的地形數據庫中含有試驗機場的地形信息,導航系統的數據庫中包含導航信息;(2)試驗機場含有需要配合試驗使用的指點信標臺、航向臺、下滑臺、VOR臺和DME臺等設備需經過民航部門的校驗合格。
1.2.2 試飛內容
設置的試飛科目需要考慮某型直升機新增伏爾導航系統的設計與使用需求和試驗機場的實際情況,驗證伏爾導航設備裝機后的裝機適應性,驗證VOR設備的作用距離、信號全角度覆蓋性、指針方向準確性,驗證DME測距機穿越、進場、爬升、遠距離收訊、最大作用距離等功能是否滿足設計和使用需求,驗證儀表著陸系統的指示正確性。考慮上述因素,設置的試飛內容包括:裝機適應性試飛、甚高頻全向信標試飛、近程測距導航系統試飛、儀表著陸系統試飛等。
(1)裝機適應性試飛。通過直升機懸停、近地面機動、起落航行飛行、空域飛行等飛行姿態,驗證直升機新增伏爾導航系統的設備安裝是否牢固、對機上平臺是否具有電磁干擾、設備的工作是否正常等。
(2)甚高頻全向信標試飛。VOR作用距離:直升機以氣壓高度2000m,指示空速180km/h沿試驗機場的跑道方向背臺飛行至距離VOR臺最大作用距離的位置,飛行過程中檢查VOR指針和數據是否出現丟失情況;飛過最大作用距離后再沿航線向臺飛行,飛行過程中檢查VOR指針和數據是否出現丟失情況。
1)VOR圓弧:直升機以氣壓高度2000m,試驗機場為中心,半徑為10km,分別以順時針和逆時針各盤旋飛行一周,檢查VOR臺的指針和數據是否出現丟失現象。2)VOR引導著陸:直升機飛行至距離試驗機場20km處,氣壓高度1000m,按VOR引導方式進行著陸引導,按照VOR引導方式操縱直升機,將直升機引導至試驗機場跑道上空;沿著跑道繼續前飛,檢查VOR引導的“向臺-背臺”能正確改變指向。
(3)近程測距導航系統試飛。DME爬升和最大作用距離:直升機距DME地面臺20km,離地高度600m,指示空速180km/h向臺飛行,飛過DME地面臺10km~20km后,以氣壓高度2100m平飛,期間航向保持背臺徑向航向,直升機飛至距離DME地面臺最大作用距離,飛行至測距器信號丟失,記錄最大距離。
1)DME遠距離收訊:直升機距DME地面臺背臺飛行,氣壓高度2100m,指示空速180km/h,至距DME地面臺最大作用距離時,以坡度8°~10°向右360°轉彎,觀察期間測距器信號丟失情況;回到徑向航向至距DME地面臺最大作用距離時以坡度8°~10°向左360°轉彎,觀察期間測距機信號丟失情況。2)DME穿越和進場:直升機距DME地面臺20km朝向DME地面臺飛行,氣壓高度2100m,指示空速180km/h,至距DME地面臺15km時,以8m/s的下降速度下降至氣壓高度1500m,距DME地面臺10km~12km,觀察直升機下降期間測距機信號不得丟失;直升機距DME地面臺20km,朝DME地面臺進場著陸飛行,期間觀察測距機信號不得丟失(過臺除外)。
(4)儀表著陸系統試飛。在直升機上設置試驗機場的ILS臺工作頻率,直升機飛至距跑道入口25km左右,氣壓高度1300m,截獲航向信號后,按進場著陸引導畫面航跡偏離指示航向指引,繼續進場,直至截獲下滑信號,然后按進場著陸引導畫面航向下滑偏離指示航向指引直升機下滑(下滑角約為3°),引導直升機著陸到試驗機場;著陸后再次起飛,向左拉起轉回至進場方向離跑道入口18km處,氣壓高度900m,再次引導進場,下滑至離地高度60m決斷高度,再向右拉起轉回至進場方向離跑道入口18km處,氣壓高度900m,再次引導著陸,檢查航向寬度及偏航向指示的正確性;直升機再次起飛到進場方向距跑道入口18km處,離地高度400m,以航跡偏離指示航向指引,保持離地400m高度平飛通過跑道入口,檢查下滑道寬度及上下偏航指示的正確性,飛行示意圖如圖3所示。

圖3 ILS引導著陸示意圖
1.3 數據誤差分析
VOR導致的誤差標準差的基本表達式為下式(1),式中L為直升機到VOR地面臺的距離,GS error為地面臺的誤差,Airborne error為包括接收機噪聲在內的機載誤差的標準差。
![]() (1)
(1)
將VOR地面臺提供的徑向信號的高斯誤差設定為平均值為0、標準差為7°,機載接收機的標準偏差精度為1°,可以推導出式(2):
![]() (2)
(2)
DME導致的誤差標準差的基本表達式為下式(3),式中K為常值系數,D為直升機到DME地面臺的距離,GS error為地面臺的誤差,Air error為空中誤差:
![]() (3)
(3)
依據航空無線電技術委員會的《區域導航所需要導航性能最低航空系統性能標準》,對于1989年1月1日以后的DME系統的誤差小于0.2海里(95%),因此可以得出[8]:
![]() (4)
(4)
以VOR/DME方式下定位標準差長軸1σ的計算表達式為:
 (5)
(5)
實際導航性能(ANP)的公式為:
![]() (6)
(6)
其中,轉換因子k與1σ誤差橢圓的長短軸半徑的比例有關,k的值最終趨近于1.9625,通過上式,以直升機估計位置為原點可以得出1σ誤差橢圓,以及95%等概率誤差圓和所需任務性能RNP的值為半徑的圓,如圖4所示。若95%等概率誤差圓落入RNP值的半徑圓內,則導航系統的ANP<RNP滿足要求,否則不滿足要求。
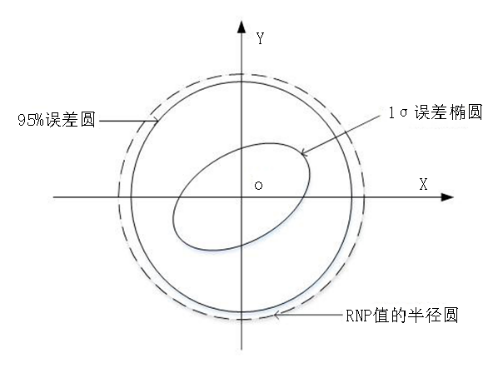
圖4 ANP誤差圖
1.4 試飛結果
通過對某型機新增的伏爾導航系統進行試飛驗證,通過查看飛行參數記錄系統和視頻記錄儀及試飛員評述可以得出以下結論。
(1)通過直升機的裝機適應性飛行驗證了伏爾導航系統工作正常、安裝牢固、與機上其他設備不存在電磁干擾現象;(2)通過直升機的甚高頻全向信標飛行驗證了直升機平臺上的VOR臺的作用距離、圓弧飛行、引導著陸等功能正常,滿足設計和使用要求;(3)通過直升機的近程測距導航系統飛行驗證了直升機平臺上的MED臺的爬升、穿越、進場、遠距離收訊、最大作用距離等功能正常,滿足設計和使用要求;(4)通過直升機的儀表著陸系統飛行驗證了直升機平臺上的ILS臺的引導著陸功能正常,滿足設計和使用要求。
2.結論
本文簡要介紹了飛行器的導航臺發展歷程,具體介紹了一套直升機上裝載的伏爾導航系統的組成、工作方式和原理,說明了改型機的伏爾導航系統的試飛前的準備工作和試飛內容,根據試飛結果和數據誤差分析情況得出相應的試飛結論,為后續的其他飛行器的伏爾導航系統飛行試驗提供參考。
在驗證伏爾導航系統的試飛項目時,應按照實際的使用需求設置試飛科目,兼顧試飛工作的效率和試飛完成的質量,對于試飛結果的判斷要全面考慮飛行參數系統記錄的數據、視頻記錄儀記錄的畫面和試飛員的評述意見。該試飛科目為航電設備試飛科目,風險性不高,但是試飛過程中需要排除各種干擾因素,防止對飛行結果產生干擾,導致飛行數據準確性降低。
參考文獻
[1] 許靜,張杰.淺談NDB導航臺測向誤差的原因和解決措施[J].中國科技信息,2010,(1):34+40.
[2] 岳猛,鄒嘉旭,胡玥,等.航空甚高頻VHF數據鏈安全通信技術[J].中國民航大學學報,2022,40(3):1-7.
[3] 沈笑云,褚世超,焦衛東,等.DME/DME區域導航的導航臺優選算法[J].中國民航大學學報,2014,32(3):31-36.
[4] 萬嘉鈺,李魁,高鵬宇,等.INS/ILS組合高精度進近著陸系統仿真研究[J].計算機仿真,2016,33(4):95-100.
[5] 方凌.民航陸基近距無線電建模與機載綜合導航可靠融合技術[D].南京:南京航空航天大學,2012.
[6] 陳海浪,陳東.伏爾導航系統信號處理[J].電子世界,2020,(11): 151-153.
[7] 胥本濤,由立巖,梁遠東,等.指點信標結合試飛研究[J].民用飛機設計與研究,2014,(4):69-71,104.
[8] 王丹,馬航帥,孫曉敏.陸基區域導航實際導航性能評估方法研究[J].航空電子技術,2018,49(2):13-18.
Research on Flight Test Technology of a Vole Navigation System Based on Helicopter Platform
WANG Xijian
(China Helicopter Research and Development Institute, Jingdezhen Jiangxi 333001)
Abstract:The development history of aircraft navigation station is briefly introduced, the composition and functions of a set of vol navigation system based on helicopter platform are introduced in detail, this paper introduces the preparations, flight test contents and flight test results before the flight test of the newly added Vol navigation equipment of a certain aircraft, and analyze the flight test results, give suggestions on flight test of Vol navigation system, it provides reference for flight test of other aircraft's Vol navigation equipment.
Key words:helicopter;flight test technology;vol navigation system
上一篇:淺談宣傳工作在企業中的重要性
