
- 熱點(diǎn)文章
-
- 09-14關(guān)于高等職業(yè)院校弱電專業(yè)教改的探索
- 11-28東芝將在2009年CES帶來新水平的前沿技術(shù)
- 11-28互聯(lián)網(wǎng):世界的鏡子
- 11-28中美文化論壇研討數(shù)字技術(shù)保護(hù)文化
- 11-28淺析“三鹿集團(tuán)奶粉事件”危機(jī)根源
- 11-28新媒體的發(fā)展及其教育創(chuàng)新應(yīng)用研究
- 11-28樓宇信息系統(tǒng)的現(xiàn)狀與應(yīng)用以及發(fā)展趨勢
- 11-28中國2009世界郵展60城市巡郵漯河站啟動
- 11-28打造煥發(fā)生命活力的教育時空
- 11-28觀察中國管理教育30年
- 11-28駕馭論:科學(xué)發(fā)展的新智囊
- 11-28軟著陸將解讀中國管理國際化新走勢
- 11-28創(chuàng)建中國水電國際化強(qiáng)勢品牌
- 11-28管理科學(xué)進(jìn)入新觀察時代
- 11-28全球化傳播語境下的家國建構(gòu)
- 11-28網(wǎng)絡(luò)民主對公民社會建設(shè)的影響研究
- 11-28奧運(yùn)后中國酒店業(yè)的發(fā)展分析
- 11-28國家創(chuàng)新系統(tǒng)下的大學(xué)科研管理研究
- 11-28高校數(shù)字圖書館建設(shè)及服務(wù)模式探討
- 11-28非均衡理論及我國房地產(chǎn)市場供求
- 11-28綠色、安全和通訊是汽車電子的未來
- 11-28敦煌莫高窟將為游客建"數(shù)字洞窟"
- 11-28思科新軟件平臺幫媒體公司建社交網(wǎng)絡(luò)
- 11-28蘋果喬布斯:用13年給IT業(yè)洗一次腦
- 11-28海外傳真:2008年數(shù)字印刷市場回顧
- 11-28東芝將在2009年CES帶來新水平的前沿技術(shù)
- 11-28互聯(lián)網(wǎng):世界的鏡子
- 11-28中美文化論壇研討數(shù)字技術(shù)保護(hù)文化
- 11-28故宮國圖面臨“數(shù)字化”難題 缺乏專門人才
基于K-ELM的渦槳發(fā)動機(jī)扭矩信號重構(gòu)方法研究
2023-07-12 20:16:00 來源:優(yōu)秀文章
摘要:針對小型渦槳發(fā)動機(jī)高狀態(tài)下輸出扭矩測不準(zhǔn),部件模型求解扭矩實(shí)時性差的問題,提出了一種基于核極限學(xué)習(xí)機(jī)的扭矩信號重構(gòu)方法。利用核極限學(xué)習(xí)機(jī)構(gòu)建發(fā)動機(jī)扭矩估計器,通過當(dāng)前發(fā)動機(jī)和螺旋槳狀態(tài)參數(shù)預(yù)測發(fā)動機(jī)輸出扭矩。將傳感器采集的扭矩信號和估計器預(yù)測的扭矩進(jìn)行加權(quán),重構(gòu)出輸出的扭矩信號。引入置信區(qū)間,對重構(gòu)的扭矩信號進(jìn)行校驗。以某渦槳發(fā)動機(jī)試驗數(shù)據(jù)進(jìn)行測試,結(jié)果表明:重構(gòu)后的扭矩值相比于直接測量的扭矩值有更高的精度,所有狀態(tài)下的誤差不大于7.5%,同時也表明該方法具備一定的容錯能力。
關(guān)鍵詞:渦槳發(fā)動機(jī);扭矩測量;在線核極限學(xué)習(xí)機(jī);信號重構(gòu)
中圖分類號:V233.7 文獻(xiàn)標(biāo)識碼:B 文章編號:1671-2064(2023)05-0058-04
渦槳發(fā)動機(jī)的輸出扭矩是表征發(fā)動機(jī)狀態(tài)的重要參數(shù),也是用于發(fā)動機(jī)控制的重要測量參數(shù)之一。對于結(jié)構(gòu)比較緊湊的中小型渦槳發(fā)動機(jī)來說,沒有足夠空間來布置獨(dú)立的測扭器,大多通過測量減速器內(nèi)的測扭腔滑油壓力,間接得到發(fā)動機(jī)輸出扭矩。這種測扭方法十分依賴扭腔內(nèi)特性,但在實(shí)際使用中發(fā)現(xiàn),測扭腔內(nèi)的滑油壓力在某些狀態(tài)下不敏感,使得測量扭矩與真實(shí)值偏差較大,嚴(yán)重影響使用安全。為此,重新構(gòu)建扭矩輸出信號,增加扭矩解析余度十分有必要的[1]。
隨著人工智能算法開始廣泛的興起,逐步取代傳統(tǒng)的回歸算法[2]被深度用于航空發(fā)動機(jī)傳感器故障診斷與重構(gòu)中[3]。其中神經(jīng)網(wǎng)絡(luò)算法是最具代表性的機(jī)器學(xué)習(xí)算法。但由于存在泛化能力比較弱、訓(xùn)練速度慢、容易陷入局部最優(yōu)解等問題逐漸被淘汰[4-5]。極限學(xué)習(xí)機(jī)(Extreme Learning Machine,ELM)是一種單隱層前饋神經(jīng)網(wǎng)絡(luò)算法[6],解決了傳統(tǒng)神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)速度慢、泛化能力不足的問題,經(jīng)常被用于航空發(fā)動機(jī)傳感器故障診斷中[7]。但是ELM也存在輸入權(quán)值隨機(jī)產(chǎn)生,算法不穩(wěn)定等問題。Huang等將核函數(shù)引入到極限學(xué)習(xí)機(jī)中得到核極限學(xué)習(xí)機(jī)(kernel-based ELM, K-ELM)[8]。k-ELM算法避免了ELM算法隨機(jī)初始化的問題,同時也具有準(zhǔn)確性好、泛化能力強(qiáng)的特點(diǎn)[9]。
本文針對渦槳發(fā)動機(jī)扭矩信號不準(zhǔn)確的問題,提出基于K-ELM的扭矩信號重構(gòu)方法[10],并利用試車數(shù)據(jù)進(jìn)行驗證,獲得了較為滿意的效果。
1. K-ELM算法
對于給定的樣本{(xi,yi)│i=1,2,…,n}來說,其中xi= [xi1,xi2,xi3,…,xin]T∈Rn為輸入數(shù)據(jù),yi為輸出量。設(shè)定隱含層激勵函數(shù)為g(x),L個隱含層節(jié)點(diǎn),則ELM模型為:
yi=∑Lj=1 g(ajTxj+bj)βj=hT(x) (1)
式中,aj=[a1j,a2j,a3j,…,anj]T,為連接第j個隱含節(jié)點(diǎn)的輸入權(quán)值向量,bj為第j個隱含節(jié)點(diǎn)偏置。β=[β1,β2,β3,…,βL]T,為輸出權(quán)值向量;h(x)=[g(a1Tx+b1),g(a2Tx+b2),g(a3T x+b3),…, g(aLTx+bL)]T為特征映射,g(x)為隱層激活函數(shù)。ELM中輸入權(quán)值和隱含節(jié)點(diǎn)偏置都是預(yù)先設(shè)置好的,激活函數(shù)也需要預(yù)先設(shè)定。輸出權(quán)值β的求解問題可以轉(zhuǎn)化為:
hT(xi)β=yi-εi,i=1,2,…,n (2)
求解式(2)得到:
β=HT(1/C In+HHT)-1 Y (3)
式中,H=[h(x1),h(x2),…,h(xn)]T,是隱含層輸出矩陣,In是單位陣,C為正則化參數(shù)。
K-ELM算法是一種使用核函數(shù)代替ELM算法中神經(jīng)元映射關(guān)系的自學(xué)習(xí)算法。在傳統(tǒng)ELM算法中,由于輸入權(quán)值和隱層節(jié)點(diǎn)閾值是隨機(jī)賦值的,因此導(dǎo)致ELM模型的會在某些區(qū)間內(nèi)不穩(wěn)定。而隨著K-ELM算法核函數(shù)的引入,不僅解決了ELM模型的穩(wěn)定性問題,而且計算更為簡便。
定義核函數(shù):k(x,y)=<h(x),h(y)>,這里<h(x),h(y)>表示特征映射的內(nèi)積,于是可以定義核矩陣Ω=HH T
Ωi,j=h(xi)·h(xj)=k(xi,xj) (4)
將核函數(shù)代入式(1)和式(3)得到K-ELM的預(yù)測函數(shù):
hT(x)β=h(x) HT(I/C+HHT)-1Y=
 (5)
(5)
式中,α是K-ELM的輸出權(quán)值α=(1/C In+Ω)-1 Y。
構(gòu)造的核矩陣替代了ELM的隱層隨機(jī)矩陣,輸出權(quán)值由隨機(jī)轉(zhuǎn)變?yōu)槲ㄒ唬罱K使預(yù)測輸出趨于穩(wěn)定。
2. 測扭腔扭矩測量原理
由于渦槳發(fā)動機(jī)減速器斜齒輪上的軸向力與發(fā)動機(jī)扭矩成正比,所以可以通過測量減速器的齒輪軸向力,來間接測量發(fā)動機(jī)輸出扭矩,如圖1所示。
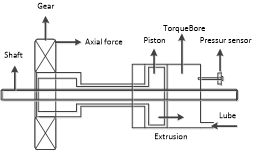
圖1 測扭機(jī)構(gòu)原理圖
當(dāng)發(fā)動機(jī)輸出扭矩較小時,減速器齒輪受到軸向力也相對較小,此時活塞上的軸向力小,活塞處于較左側(cè)。當(dāng)發(fā)動機(jī)扭矩增大后,軸向力增大,推動測扭活塞往右移動,測扭腔容積道減小,腔內(nèi)滑油壓力升高,直到重新與活塞上的軸向力平衡。因此可以測量測扭腔內(nèi)的滑油壓力,即扭矩壓力,間接得出發(fā)動機(jī)的真實(shí)扭矩值。
由于減速器內(nèi)空間有限,導(dǎo)致測扭活塞的受力面積較小,而且測扭腔的滑油壓力受到整個滑油系統(tǒng)的供油能力限制。所以當(dāng)發(fā)動機(jī)輸出扭矩較大,測扭腔滑油流通通道幾乎完全關(guān)閉,扭矩壓力已接近減速器滑油供油能力的極限值,此時的滑油壓力與扭矩已不再成單一的線性關(guān)系。在進(jìn)行扭矩-扭矩壓力擬合時,采用了失真的扭矩壓力信號和車臺測量的真實(shí)扭矩進(jìn)行擬合,導(dǎo)致扭矩-滑油壓力的曲線斜率偏大或偏小,對應(yīng)關(guān)系失真。嚴(yán)重干擾用戶正常使用。
3. 基于K-ELM的扭矩信號重構(gòu)方法
輸出扭矩可以根據(jù)飛機(jī)或發(fā)動機(jī)傳回的狀態(tài)參數(shù),利用發(fā)動機(jī)氣動熱力學(xué)模型實(shí)時計算發(fā)動機(jī)扭矩。但氣動熱力學(xué)模型復(fù)雜,依賴準(zhǔn)確的發(fā)動機(jī)部件特性,無法再滿足通用的要求。同時機(jī)載計算資源有限,不能滿足控制系統(tǒng)實(shí)時計算的要求。
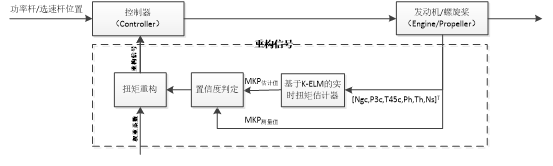
圖2 扭矩信號重構(gòu)方法原理圖
發(fā)動機(jī)扭矩信號重構(gòu)原理圖如圖2所示。首先利用K-ELM估計器對扭矩信號計算。選擇氣體發(fā)生器轉(zhuǎn)速換算ngc、螺旋槳轉(zhuǎn)速ns、壓氣機(jī)出口換算壓力P3c、渦輪級間換算溫度T45c、滑油壓力Ph及滑油溫度Th,8個信號作為估計器輸入。其中ngc、P3c、T45c與發(fā)動機(jī)狀態(tài)相關(guān)性較大,ns與扭矩直接成比例關(guān)系、Ph及Th與測扭機(jī)構(gòu)狀態(tài)相關(guān)。
Mg=f (X) (6)
式中:X=[ngc,ns,P3c,T45c,Ph,Th],Mg是扭矩估計器的估計值
為保證K-ELM方法估計的扭矩值不出現(xiàn)大的波動,導(dǎo)致重構(gòu)的扭矩信號異常。引入置信度閾值R=[Rmin,Rmax]。
Rt=Mg,t/Mc,t (7)
根據(jù)實(shí)際的測試情況,設(shè)定R取值范圍。如果Rt∈R,則說明估計器正常;反之,則說明估計器輸出異常,將該時刻的扭矩測量值發(fā)給控制器,避免引起發(fā)動機(jī)誤告警。
為了提高重構(gòu)信號在某些狀態(tài)下的精度,將發(fā)動機(jī)實(shí)際測量的扭矩和估計器計算的扭矩分配不同的權(quán)重。重構(gòu)的扭矩信號表達(dá)式為:
Mo=ω1Mc+ω2Mg (8)
其中,ω1,ω2∈(0,1),且ω1+ω2=1,Mc是發(fā)動機(jī)測量扭矩,Mo是重構(gòu)的扭矩值。
4. 驗證
以某渦槳發(fā)動機(jī)的校準(zhǔn)數(shù)據(jù)作為驗證數(shù)據(jù)。選擇其中的2500組數(shù)據(jù)作為訓(xùn)練樣本,600組作為測試樣本。訓(xùn)練樣本和測試樣本中帶有車臺測試的噪聲信號。在校準(zhǔn)過程中,車臺測扭機(jī)構(gòu)測量的扭矩值作為真實(shí)值Mr,發(fā)動機(jī)自身測量的扭矩為測量值。
估計模型中核函數(shù)選擇高斯核函數(shù),核半徑設(shè)為0.1,正則化系數(shù)為10。測試結(jié)果的扭矩測量值、估計值如圖3和圖4所示。

圖3 測量值、估計值與真實(shí)值對應(yīng)情況
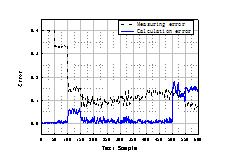
圖4 K-ELM扭矩估計器估計誤差
圖中實(shí)線為扭矩真實(shí)值,虛線為測量值和通過估計器直接輸出的估計值。可以看出,測量扭矩在低狀態(tài)時尚可以較好地跟蹤真實(shí)的扭矩值,但隨著發(fā)動機(jī)狀態(tài)變大,與真實(shí)值的誤差也隨之增加。而在高扭矩狀態(tài)時,單純的估計器的精度較好,誤差小于5%。在小狀態(tài)時估計器則不能很好地跟蹤實(shí)際狀態(tài),誤差大于10%。
針對測量扭矩和估計扭矩在不同狀態(tài)下的精度特點(diǎn),對權(quán)值ω分段賦值,提升重構(gòu)精度。重構(gòu)后的扭矩信號如圖5所示,重構(gòu)誤差如圖6所示。可以看出,重構(gòu)后扭矩在所有狀態(tài)下的誤差不大于7.5%。相比于估計值,小狀態(tài)的精度有了大幅提升,大狀態(tài)基本與估計值相近。
測試數(shù)據(jù)表明了重構(gòu)后扭矩信號可以很好地追蹤真實(shí)值,并且可以在一定程度上抑制輸入的噪聲。
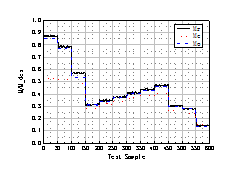
圖5扭矩信號重構(gòu)結(jié)果

圖6扭矩信號重構(gòu)誤差
為了檢測重構(gòu)方法在異常條件下的魯棒性,在樣本中加入添加5組ngc信號異常的測試數(shù)據(jù)。輸入輸出情況如表1所示。
表1 ngc異常給定情況下扭矩輸出

從表1中可以發(fā)現(xiàn),當(dāng)R值超過規(guī)定的置信區(qū)間后,估計值與實(shí)際值相比,偏差較大,甚至出現(xiàn)負(fù)值。這是由于訓(xùn)練樣本的有限性,導(dǎo)致估計器出現(xiàn)外插造成的。從表1中可以看出,在引入置信區(qū)間后,重構(gòu)扭矩的偏差在可接受范圍內(nèi),有效地避免由于估計值權(quán)重過高導(dǎo)致的重構(gòu)扭矩突變情況的發(fā)生。
5. 結(jié)論
本文從工程應(yīng)用角度出發(fā),提出了一種基于K-ELM的扭矩信號重構(gòu)方法。經(jīng)過實(shí)際試驗數(shù)據(jù)的訓(xùn)練和測試表明,基于K-ELM的扭矩信號重構(gòu)方法能夠有效地對扭矩信號進(jìn)行重構(gòu),比通過測扭腔壓力測定的輸出扭矩在精度上有了大幅提升,能夠保證發(fā)動機(jī)的正常運(yùn)行;同時重構(gòu)方法具備一定的泛化能力,可以在有測量噪聲或誤差的情況下,仍然能夠重構(gòu)扭矩信號,并且有較高的預(yù)測精度。
參考文獻(xiàn)
[1] Garg S,Schadow K,Hom W,et al.Sen- sor and Actuator Needs for More Intelli- gent Gas Turbine Engines[R].NASA TM-2010-216746.
[2] ZHAO Yongping,SUN Jianguo.Fast On-line Approximation for Hard Suppport Vec-tor Regression and Its Application to Anal-ytical Redundancy for Aeroengine[J].Chinese Journalof Aeronautics,2010,23(2):145-152.
[3] 徐啟華,師軍,耿帥.應(yīng)用快速多分類SVM的航空發(fā)動機(jī)故障診斷方法[J].推進(jìn)技術(shù),2012,33(6):961-967.
[4] 殷鍇,鐘詩勝,那媛,等.基于BP神經(jīng)網(wǎng)絡(luò)的航空發(fā)動機(jī)故障檢測技術(shù)研究[J].航空發(fā)動機(jī),2017,43(1):53-57.
[5] Sadough Vanini Z N,Khorasani K,Meskin N.Defect Detection and Isolation of a Dual Spool Gas Turbine Engine Using Dynamic Neural Networks and Multiple Model Approach[J].Information Sciences,2014,259(2):234 -251.
[6] 陳曉青,陸慧娟,鄭文斌,等.自適應(yīng)混沌粒子群算法對極限學(xué)習(xí)機(jī)參數(shù)的優(yōu)化[J].計算機(jī)應(yīng)用,2016,36(11):3123-3126.
[7] 張英堂,馬超,李志寧,等.基于快速留一交叉驗證的核極限學(xué)習(xí)機(jī)在線建模[J].上海交通大學(xué)學(xué)報,2014,48(5):641-646.
[8] 孫毅剛,劉靜雅,趙珍.基于極限學(xué)習(xí)機(jī)的航空發(fā)動機(jī)傳感器故障診斷[J].傳感器與微系統(tǒng),2014,(8):23-26.
[9] Huang G B,Zhao H G,Ding X J,et al.Extreme Learning Machine for Regression and Multiclass Classification[J]. IEEE Transactions on Systems,Man,and Cybernetics:Part B Cybernetics,2012,42(2):513-529.
[10] 尤成新,魯峰,黃金泉.航空發(fā)動機(jī)傳感 器信號重構(gòu)的K-ELM方法[J].航空動力學(xué)報,2017,32(1):221-226.
Turboprop Engine Torque Signal Reconfiguration Based on K-ELM Method
YANG Yufei,HUANG Qin,ZHANG Longdong,HUANG Xing
(AECC Hunan Aviation Powerplant Research Institute, Zhuzhou Hunan 412002)
Abstract:To solve the problem of inaccurate measurement of turboprop engine torque at high power condition, and non-real-time computing the power based on component model, a turboprop engine torque signal reconfiguration based on kernel extreme learning machine method was proposed. Firstly, a torque estimator was established by K-ELM, predicting engine torque from current engine and propeller status parameters. Then the output torque signal is reconfigured from measured data and predicted data. Finally, engine torque confidence was checked. To verify the effectiveness of this method, the test data of turboprop engine is taken as the test object, Results show that the reconstructed torque signal is more accurate than measured torque, the maximum mean relative error is less than 7.5% at all conditions. And the method has certain fault tolerant.
Key words:turboshaft engine;torque meassure;kernal extreme learning machine;signal reconfiguration
